本节介绍一种新的数据结构-图,图的应用非常广泛,例如社交网络中的好友关系、计算机网络连接关系、地图道路等等,图的种类多种多样,根据不同的业务需求,选择不同的图,这里介绍4中最重要的图模型:无向图(简单连接)、有向图(连接有方向)、加权图(连接带有权重)、加权有向图(连接既有方向又包含权重)。
无向图
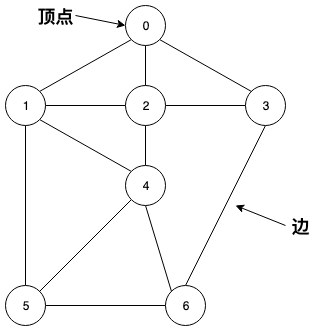
无向图的定义是这样的:
图是由一组顶点和一组连接两个顶点的边组成的。
一般来说,顶点叫什么我们并不关心(地图中的路口、社交网络中的人、电路中的元器件都是顶点),我们只需要有一种方法来指代这些顶点,一般用 0 到 V-1 来表示一张包含 V 个顶点的图。
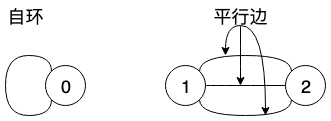
有两种特殊的情况:
- 自环:一个顶点,一条边头尾都连接到顶点;
- 平行边:头尾是同一对顶点的两条边称为平行边。
与图相关的几个术语:
- 相邻顶点:如果两个顶点通过一条边相连时,那么这两个顶点是相邻的,并称这条边依附于这两个顶点;
- 顶点的度:与顶点相连的边的数量,叫做顶点的度;
- 路径:路径是由边顺序连接的一组顶点;
- 连通图:图中任意两个顶点都至少有一条路径连接,这种图叫做连通图;
- 环:至少包含一条边,并且起点和终点相同的路径。
如果将图看做是物理存在的物体,比如绳结为顶点、绳子为边,那么拎起任意一个绳结,连通图将会是一个整体,而非连通图将会散落成好几部分。
表示方法
图是用来解决实际问题,所以表示图的数据结构应该能够解决绝大部分问题,其应该具备以下两点:
- 能够容纳各种规模的数据,小到几十个顶点,大到百万个顶点;
- 操作起来效率要高。
一般可供选择的表示方法由:邻接矩阵、边数组、邻接表数组,下面就具体看一下这三种方法各有什么优缺点。
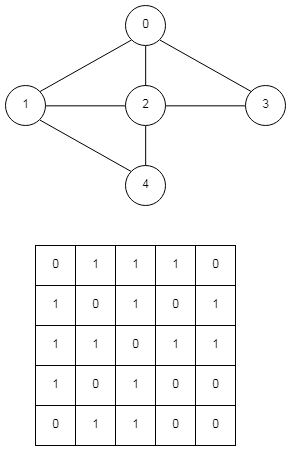
邻接矩阵
邻接矩阵是基于二维数组的,如果图$V$中的顶点$i$、$j$有边连接,对应矩阵的第i行、j列标记为1,所以对于包含 $n$ 个顶点的图,就需要 $n x n$ 的二维数组,这就会造成极大的空间浪费,不满足上面的第一点要求;另外,邻接矩阵无法表示平行边。
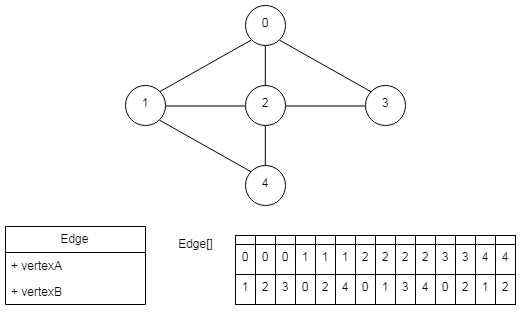
边数组
这种方法是定义边结构体,其中包含所依附的顶点,将图所有的边存储到数组中,这种方式对于某些操作(比如查找顶点相连的边)效率比较低,需要遍历所有的边才能够完成,不满足上面的第二点要求。
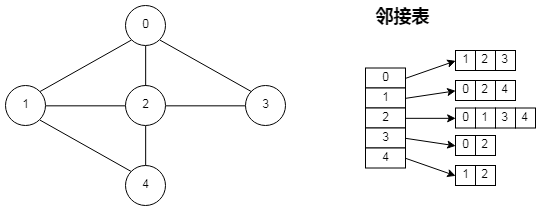
邻接表
邻接表是顶点索引的数组,数组元素为指向链表的指针,链表中存储着该顶点相邻的顶点索引。采用这种方式能够满足上面的两点要求,对于一个包含 V 个顶点 E 条边的图,所需的空间大小为 V + E;查找相连顶点的时间复杂度为 $O(1)$;为顶点增加新连接的时间复杂度与该顶点的度成正比;并且能够表示平衡边。
如果顶点不是整数,没有办法作为索引,这种情况可以采用散列表替换数组和链表,比如 C# 中的 Dictionary、HashSet。
无向图基础操作
这里只实现图相关的基本操作,采用邻接表表示方式,包括:
- 添加边;
- 获取顶点个数;
- 获取边数;
- 获取相邻顶点;
- 计算顶点的度;
- 计算所有顶点的最大度数;
- 计算所有顶点的平均度数。
为了实现起来简便,这里没有实现添加顶点、删除顶点、删除边,顶点也表示为整数。
直接上代码:
1 | public class Graph |
搜索算法
在介绍完了图的一些基础算法之后,继续介绍图的搜索算法,图的搜索算法用途非常广泛,最典型的是寻路,将地图抽象为图结构,给定起点、终点,搜索出一条可行的路径;再比如社交网络中有个著名的六度分隔理论,该理论认为世界上两个互不认识的人,最多只需要6个中间人就能够联系在一起。
图的搜索算法很多,比如下面要介绍的深度优先搜索、广度优先搜索,以及 A、IDA 等启发式算法,为了将算法和图的实现解耦,这里采用策略模式,将各个算法封装为单独的类。
广度优先搜索
广度优先搜索(Breadth-First-Search、BFS)是暴力搜索的一种,很多复杂的搜索算法都是基于广度优先搜索演变而来的,它的流程是这样的,从起始顶点开始:
- 遍历顶点 $A$ 的相邻顶点$A_i \in [A_0,A_n]$;
- 如果$A_i$已经访问过,则跳过,否则记录下在搜索路径上离 $A_i$ 最近的顶点 $A$,并标记 $A_i$ 已经访问过;
- 当 $A$ 相邻的顶点遍历完成之后,开始遍历 $A_i \in [A_0,A_n]$ 的相邻的节点,重复 1 过程。
- 直到图中所有的顶点遍历完成之后,搜索结束。
广度优先搜索是一种地毯式搜索,借助下面动画理解一下搜索过程。
虽然看起来流程很简单,但是实现起来还是略微有些麻烦,还是直接上代码,通过代码理解一下:
1 | public class BFSSearch |
深度优先搜索
广度优先搜索是层层递进的地毯式搜索,深度优先搜索则截然相反,它的搜索方式就好像一个人在走迷宫,沿着一条路一直走,直到无路可走,才回头选择其他的路。
深度优先搜索的描述比 BFS 还要简单,只需要递归地遍历图所有顶点,在访问任一顶点时:
- 如果已被标记为已搜索,则跳过,否则继续搜索;
- 将该顶点标记为已搜索;
- 递归的遍历该顶点的相邻顶点。
可以通过下面动画来理解一下这一过程:
实现代码如下:
1 | public class DFSSearch |
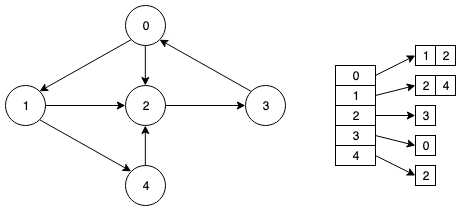
有向图
有向图和无向图非常类似,唯一的区别在于有向图的边是有方向的,有向图的应用也非常广泛,比如表示食物链(动物之间的捕食关系基本都是单向的)、论文中的引用关系等。
有向图是由一组顶点和一组有方向的边组成。
有向图的表示方法和无向图相同,都是采用邻接表。
有向图基础操作
与无向图的基本操作大致相同,不同的是添加边、删除边操作,另外有向图还会经常用到取反操作,就是将所有边的方向反向,下面直接上代码,与无向图相同的部分,这里就不列出来了。
1 | // 添加边v->w |
有向图搜索算法
深度优先搜索和广度优先搜索也都适用于有向图,主要用于解决对象可达性判断,应用非常广泛,比如垃圾回收标记算法、有向图寻路等,可达性包含单点可达性、多点可达性:
单点可达性:在给定的一个起点、一个目标点之间,是否存在有向的路径;
多点可达性:在给定多个起点、一个目标点之间,是否存在有向的路径。
1 | public class DirectedDFS |
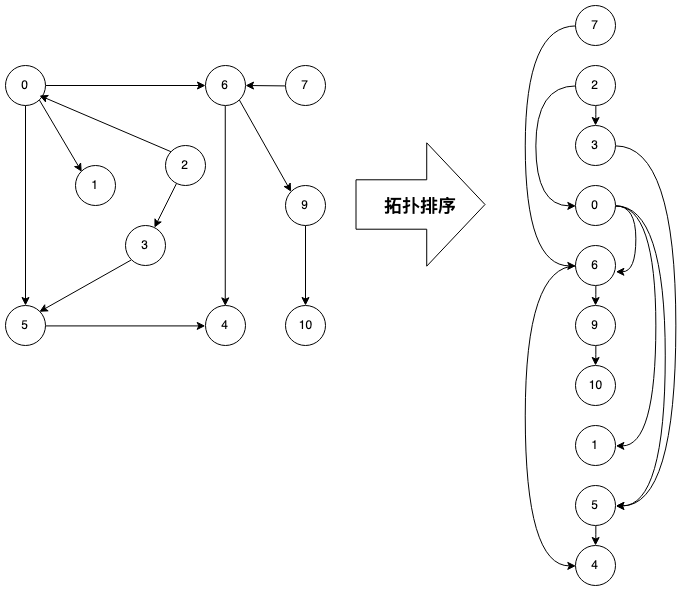
拓扑排序算法
有向图的另一个重要应用是解决调度问题,比如有一系列任务需要完成,每个任务可能都有前置执行条件,如何确定任务执行顺序,这里就可以采用拓扑排序来解决。
拓扑排序就是将有向图中的顶点进行排序,使得所有的边都从前面顶点指向后面的顶点。
从定义结合图可以看出来,如果有向图中存在环,即图必须是有向无环图(DAG),是无法进行拓扑排序的,所以在进行拓扑排序之前,需要判断有向图中是否存在有向环。
有向环判断
有向环的判断需要使用深度优先搜索,过程就像一个人拿着绳子在走迷宫,走的过程中会不断放下绳子,如果遇到了死路则回退到最近的一个路口,退的过程中会将绳子收起来,然后继续选择其他路径前进,如果前进过程中发现地上有绳子,说明该迷宫中存在环,用代码实现如下:
1 | public class DirectedCircle |
基于 DFS 的顶点排序
因为图的顶点是无序的,所以排序的目的就是希望按照某种特定的顺序来访问图的顶点,这里常用的排序主要有三种:前序、后续、逆后续。排序实现的思想是在 DFS 过程中,将每个顶点保存到一个数据结构中,然后遍历该结构就能遍历图所有顶点,遍历的顺序取决于数据结构性质和顶点插入时机。
- 前序:在递归调用之前,将顶点插入队列;
- 后续:在递归调用之后,将顶点插入队列;
- 逆后续:在递归调用之后,将顶点插入栈。
1 | public class DepthFirstOrder |
拓扑排序
DAG 的拓扑排序为所有顶点的逆后序排列,,结合上面有向环判断和顶点排序算法,能够很容易的编写拓扑排序算法:
1 | public class Topological |